










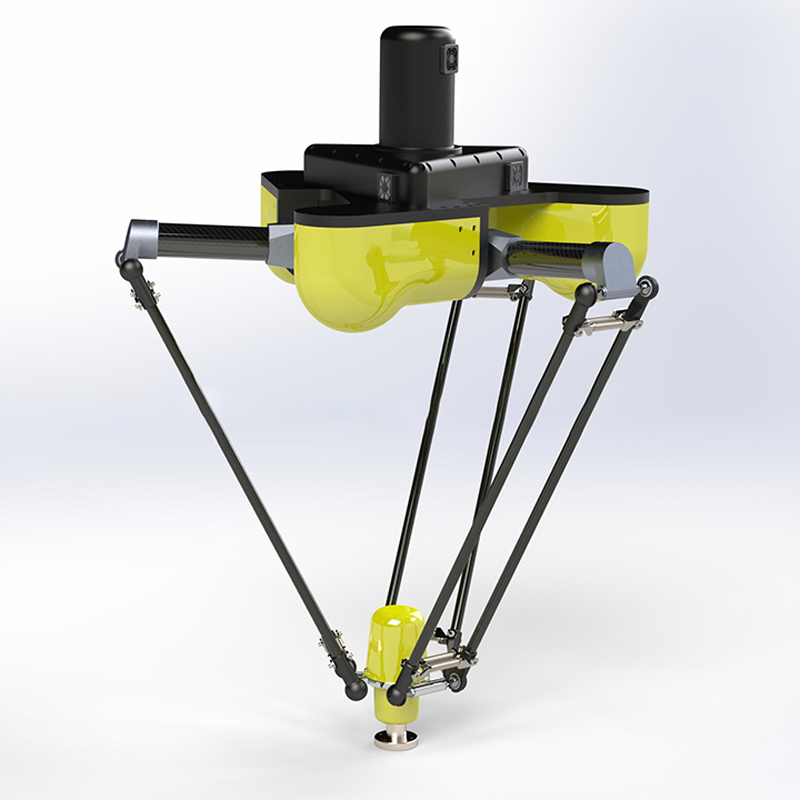
Parallel Mechanism
number of axes:4
Installation mode:inverted
Arm spread:600mm
Parallel robot, English name Parallel Mechanism, referred to as PM, can be defined as a moving platform and a fixed platform connected by at least two independent kinematic chains, the mechanism has two or more degrees of freedom, and is driven in parallel. closed loop mechanism.
The characteristics of the parallel robot are that there is no accumulated error and high precision; the driving device can be placed on the fixed platform or close to the fixed platform, so that the moving part is light in weight, high in speed and good in dynamic response.
(1) No cumulative error, high precision;
(2) The driving device can be placed on the fixed platform or close to the fixed platform, so that the moving part is light in weight, high in speed and good in dynamic response;
(3) Compact structure, high rigidity and large bearing capacity;
(4) The completely symmetrical parallel mechanism has better isotropy;
(5) The working space is small;
According to these characteristics, parallel robots are widely used in fields that require high rigidity, high precision, or large loads without a large workspace.
Telephone:+86-15688829575
email:postmaster@bremetzgroup.com
WhatsApp:+8615615781935

Address:Liuzhuang Community, Xincheng Sub-district Office, Feicheng City, Tai'an City, Shandong Province
Tel:+8615662018863
Email:postmaster@bremetzgroup.com

Wechat scan

